Дискриминатор частоты с временным сдвигом квадратурных компонент — различия между версиями
Korogodin (обсуждение | вклад) (→Сравнение с другими ЧД) |
Korogodin (обсуждение | вклад) (→Сравнение с другими ЧД) |
||
| Строка 63: | Строка 63: | ||
=== Сравнение с другими ЧД === | === Сравнение с другими ЧД === | ||
| − | Интересно сравнить дисперсию шумов по входу для | + | Интересно сравнить дисперсию шумов по входу для различных дискриминаторов: |
* Собственно дисперсия шума на входе рассматриваемого в этой статье cross дискриминатора. Обозначим ее как <math>D_1</math>: | * Собственно дисперсия шума на входе рассматриваемого в этой статье cross дискриминатора. Обозначим ее как <math>D_1</math>: | ||
Версия 11:21, 30 октября 2015
|
Дискриминатор частоты с временным сдвигом квадратурных компонент известен в англоязычной литературе как cross-product дискриминатор[1].
Дискриминатор использует отсчеты коррелятора с текущего и предыдущего такта работы:
 ,
,
где
 ,
,
 ,
,
 ,
,
 .
.
Особенности работы

Возможны различные реализация дискриминатора. На рисунке представлено два варианта, условно названных "Перекрытие" и "Перекрытие отсутствует". Поясним рисунок.
Пусть в некоторый момент времени  доступны отсчеты с выхода коррелятора
доступны отсчеты с выхода коррелятора  и отсчеты из предыдущей эпохи
и отсчеты из предыдущей эпохи  . На их основе можно сформировать отсчет дискриминатора
. На их основе можно сформировать отсчет дискриминатора  . Далее возможны варианты.
. Далее возможны варианты.
В случае, если работа идет с "перекрытием", следующий отсчет дискриминатора  будет сформирован из новых отсчетов коррелятора
будет сформирован из новых отсчетов коррелятора  и уже использованных в предыдущем шаге . Таким образом, каждое вычисление отсчета дискриминатора использует отсчеты коррелятора, уже использованные в расчете предыдущего значения дискриминатора. Поэтому шум выхода дискриминатора в данном случае оказывается коррелированным, а его СПМ отличается от СПМ белого шума.
и уже использованных в предыдущем шаге . Таким образом, каждое вычисление отсчета дискриминатора использует отсчеты коррелятора, уже использованные в расчете предыдущего значения дискриминатора. Поэтому шум выхода дискриминатора в данном случае оказывается коррелированным, а его СПМ отличается от СПМ белого шума.
Если дискриминатор работает без "перекрытия", для расчета соседних значений выхода дискриминатора каждый раз используются разные корреляционные суммы. В этом случае, шум дискриминатора будет некорреллированным с равномерной СПМ. Однако, темп работы такого дискриминатора ниже в 2 раза: ему нужно "дождаться" следующей пары отсчетов.
Для дискриминатора "с перекрытием" использование статистического эквивалента вида
 , где
, где 
при моделировании следящих систем недопустимо, т.к. он не отражает корреляционных свойств. Следует воспользоваться статистическими эквивалентами коррелятора.
Дискриминационная характеристика
Сделано допущение, что  .
.

где  ,
,  - амплитуда сигнала
- амплитуда сигнала  ,
,  - количество отчетов, накапливаемых в корреляторе,
- количество отчетов, накапливаемых в корреляторе,  - разность истинного и опорного параметров.
- разность истинного и опорного параметров.
Крутизна дискриминационной характеристики при нулевой расстройке по частоте:  .
.
В модели задержка сигнала полагалась известной:  .
.
Дискриминационная характеристика при различных временах накопления:
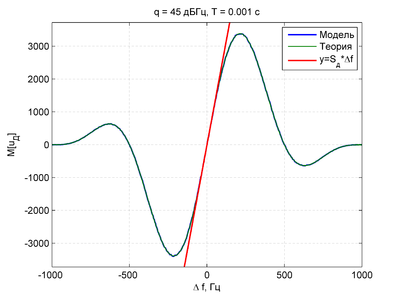
Дискриминационная характеристика при T=1 мс
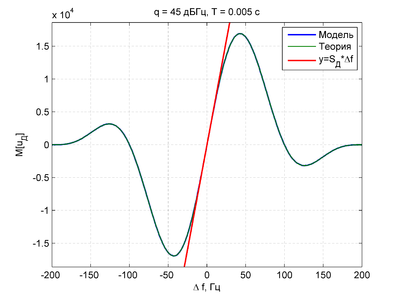
Дискриминационная характеристика при T=5 мс


Флуктуационная характеристика
Получены зависимости СКО шума на выходе дискриминатора от  для различных времен накопления. Теоретические кривые пунктирной линией.
для различных времен накопления. Теоретические кривые пунктирной линией.
_ChD.png)
Дисперсия шума эквивалентного наблюдения частоты, т.е. шума с выхода дискриминатора, пересчитанного к его входу при нулевой расстройке по частоте:

Сравнение с другими ЧД
Интересно сравнить дисперсию шумов по входу для различных дискриминаторов:
- Собственно дисперсия шума на входе рассматриваемого в этой статье cross дискриминатора. Обозначим ее как
 :
:

- Дисперсия шума на входе оптимального при низком отношении сигнал/шум частотного дискриминатора (тот, который
 ) [2], [3]. Обозначим ее как
) [2], [3]. Обозначим ее как  :
:

Пусть cross дискриминатор реализован по схеме без перекрытия, тогда  и
и
 , т. е.
, т. е.  или для СКО:
или для СКО: .
.
На рисунке ниже приведен график зависимости СКО эквивалентных шумов представленных ЧД от отношения сигнал/шум q_{c/n0}.
convert: no images defined `/tmp/transform_318f674f58f6-1.png' @ error/convert.c/ConvertImageCommand/3044.
Листинг модели
Ниже представлен листинг модели, с которой сняты картинки.
clc
close all
plotDX = 1; %считаем ДХ
plotFX = 0; %считаем дисперсию шумов
if plotDX
N = 3000;
stdn_IQ = 8;
Tc = 0.005;
qcno_dB = 45;
qcno = 10^(qcno_dB/10);
wdop_real = 2*pi*100;
wdop_oporn = [wdop_real-2*pi*(1/Tc):2*pi*(2/Tc)/500:wdop_real + 2*pi*(1/Tc)];
UdFLL = zeros(1, length(wdop_oporn));
A_IQ = stdn_IQ * sqrt(2 * qcno * Tc);
Sd = A_IQ^2*Tc;
for k = 1:N
for j = 1:length(wdop_oporn)
n_I_old = 1*stdn_IQ * randn(1,1);
n_I = 1*stdn_IQ * randn(1,1);
n_Q_old = 1*stdn_IQ * randn(1,1);
n_Q = 1*stdn_IQ * randn(1,1);
phi_real = [pi/3 pi/3 + Tc*wdop_real(1)];
phi_oporn =[pi/4 pi/4 + Tc*wdop_oporn(j)];
m_I_old = A_IQ * sinc((wdop_real(1)-wdop_oporn(j))*Tc/2 /pi)*cos(phi_real(1) - phi_oporn(1) + (wdop_real(1)-wdop_oporn(j))*Tc/2);
m_I = A_IQ * sinc((wdop_real(1)-wdop_oporn(j))*Tc/2 /pi)*cos(phi_real(2) - phi_oporn(2) + (wdop_real(1)-wdop_oporn(j))*Tc/2);
m_Q_old = - A_IQ * sinc((wdop_real(1)-wdop_oporn(j))*Tc/2 /pi)*sin(phi_real(1) - phi_oporn(1) + (wdop_real(1)-wdop_oporn(j))*Tc/2);
m_Q = - A_IQ * sinc((wdop_real(1)-wdop_oporn(j))*Tc/2 /pi)*sin(phi_real(2) - phi_oporn(2) + (wdop_real(1)-wdop_oporn(j))*Tc/2);
I_old = m_I_old + n_I_old;
I = m_I + n_I;
Q_old = m_Q_old + n_Q_old;
Q = m_Q + n_Q;
UdFLL(1, j) = UdFLL(1,j) + I*Q_old - Q*I_old;
end
if ~mod(k, N/10)
fprintf('Progress %d%%\n', k*100/N)
end
end
UdFLL_mean = A_IQ^2*(sinc((wdop_real(1)-wdop_oporn)*Tc/2 /pi)).^2.*sin((wdop_real(1)-wdop_oporn)*Tc);
UdFLL = UdFLL/N;
figure
plot((wdop_real-wdop_oporn)/2/pi,[UdFLL; UdFLL_mean; Sd*(wdop_real-wdop_oporn)]);
ylim([1.1*min(UdFLL_mean) 1.1*max(UdFLL_mean)])
grid on;
xlabel('\Delta f, Гц')
ylabel('M[u_{Д}]')
title(['q = ' num2str(qcno_dB) ' дБГц, T = ' num2str(Tc) ' c'])
end
if plotFX
N = 5000;
stdn_IQ = 8;
Tc = 0.02;
qcno_dB = [10:1:50];
wdop_real = [2*pi*100];
wdop_oporn = [2*pi*100];
D_etta_FLL = zeros(1,length(qcno_dB));
CKO_etta_FLL_teor = nan(1,length(qcno_dB));
for i = 1:length(qcno_dB)
fprintf('qcno_dB = %.0f\n', qcno_dB(i));
qcno = 10^(qcno_dB(i)/10);
A_IQ = stdn_IQ * sqrt(2 * qcno * Tc);
UdFLL = nan(1, N);
for k = 1:N
for j = 1:length(wdop_oporn)
n_I_old = 1*stdn_IQ * randn(1,1);
n_I = 1*stdn_IQ * randn(1,1);
n_Q_old = 1*stdn_IQ * randn(1,1);
n_Q = 1*stdn_IQ * randn(1,1);
phi_real = [pi/3 pi/3 + Tc*wdop_real(1)];
phi_oporn =[pi/4 pi/4 + Tc*wdop_oporn(j)];
m_I_old = A_IQ * sinc((wdop_real(1)-wdop_oporn(j))*Tc/2 /pi)*cos(phi_real(1) - phi_oporn(1) + (wdop_real(1)-wdop_oporn(j))*Tc/2);
m_I = A_IQ * sinc((wdop_real(1)-wdop_oporn(j))*Tc/2 /pi)*cos(phi_real(2) - phi_oporn(2) + (wdop_real(1)-wdop_oporn(j))*Tc/2);
m_Q_old = - A_IQ * sinc((wdop_real(1)-wdop_oporn(j))*Tc/2 /pi)*sin(phi_real(1) - phi_oporn(1) + (wdop_real(1)-wdop_oporn(j))*Tc/2);
m_Q = - A_IQ * sinc((wdop_real(1)-wdop_oporn(j))*Tc/2 /pi)*sin(phi_real(2) - phi_oporn(2) + (wdop_real(1)-wdop_oporn(j))*Tc/2);
I_old = m_I_old + n_I_old;
I = m_I + n_I;
Q_old = m_Q_old + n_Q_old;
Q = m_Q + n_Q;
UdFLL(1, k) = I*Q_old - Q*I_old;
end
end
D_etta_FLL(1,i) = mean((UdFLL - mean(UdFLL)).^2);
CKO_etta_FLL(1,i) = sqrt(D_etta_FLL(1,i));
CKO_etta_FLL_teor(1,i) = sqrt((A_IQ^2*Tc)^2*(1/(qcno*Tc^3))*(1 + 1/(2*qcno*Tc)));
end
figure
plot(qcno_dB, CKO_etta_FLL, 'r*', qcno_dB, CKO_etta_FLL_teor, 'g')
xlabel('q_c/n0, дБГц')
ylabel('\sigma_{вых} ЧД')
grid on
end